
النشرة الإخبارية
Sed ut perspiciatis unde.
النهج الاحتمالي لتحديد الموقع الذاتي في ظل عدم اليقين
جدول المحتويات:
- ما هو التوطين ولماذا يحتاجه الروبوت؟
- لماذا يتم استخدام الأدوات الاحتمالية لحساب التوطين؟
- مثال شامل: كيفية استخدام خوارزميات بايزي لتحديد موضع الروبوت في ظل عدم اليقين؟
كيف يمكن للسيارات ذاتية القيادة البقاء ضمن حارة واحدة بسرعة 60 ميلاً في الساعة؟ كيف يمكن للروبوت أن يتجنب السقوط على الدرج؟ كيف يمكن لروبوتات التوصيل معرفة ما إذا كانت ستذهب إلى العميل الجائع المناسب؟ هذه مجرد أمثلة قليلة من الأسئلة التي يجب على المركبات ذاتية القيادة الإجابة عليها دون تدخل بشري.
1. ما هو التوطين؟ ولماذا يحتاجه الروبوت؟
كما قد تتخيل، يعد تحديد الموقع الدقيق للمركبة أمرًا بالغ الأهمية لتحديد ما إذا كانت المركبة ذاتية القيادة ستكمل مهامها بفعالية وأمان. تسمى عملية تقدير موقع السيارة من بيانات المستشعر بالتوطين. تزداد دقة تحديد الموقع مع أجهزة الاستشعار التي تضيف معلومات وتقل مع حركة السيارة مما يزيد من الضوضاء.
2. لماذا يتم استخدام الأدوات الاحتمالية لحساب الترجمة؟
يمكن الاستفادة من الأدوات الاحتمالية لتحسين دقة الموقع حيث لا تكون المستشعرات ولا الحركة دقيقة بنسبة 100%.
ما هو الاحتمال؟
وفقًا لتعريف القاموس، فإن الاحتمال هو “وصف رقمي لمدى احتمال وقوع حدث ما” (ويكيبيديا). ومع ذلك، عندما يتعلق الأمر بمعنى الاحتمال، فإن الإجابة ليست بهذه البساطة. هناك تفسيرات متنافسة للاحتمالية من معسكرين رئيسيين، التكراريون والبايزيون.
ال متكرر ويفسر النهج الاحتمالية على أنها التكرار النسبي مع مرور الوقت؛ كم مرة سأحصل على النتيجة المرجوة إذا كررت التجربة عدة مرات؟
يعد هذا النهج موضوعيًا لأن أي شخص يقوم بإجراء التجارب (مثل رمي العملة المعدنية) سيحصل على نفس النتيجة على المدى الطويل.
ال بايزي يفسر النهج الاحتمالية على أنها درجة اليقين بحدوث حدث ما. ما مدى تأكدي من أنني سأحصل على النتيجة المرجوة في ضوء المعرفة المتخصصة والبيانات المتاحة؟ هذا النهج شخصي، لأنه يمثل حالة الاعتقاد الحالية من خلال الجمع بين المعرفة السابقة (الذاتية) والبيانات التجريبية المعروفة حتى الآن. فهو يسمح بتقدير احتمالية وقوع حدث فردي لا يمكننا تشغيله عدة مرات، حيث لا ينطبق المعنى المتكرر.
على سبيل المثال، إذا كان احتمال الرد عليك من أحد الأشخاص بعد أول لقاء لك هو 0.8، فنحن متأكدون بنسبة 80% من أنك قضيت وقتًا ممتعًا وسيقوم الشخص بالرد عليك؛ نحن لا يعني أنهم سيرسلون رسالة نصية بنسبة 80% من الوقت إذا كررت التاريخ الأول مرارًا وتكرارًا.
ما هي فوائد الاحتمال البايزي؟
يسمح لنا الاحتمال البايزي بتحديد درجة إيماننا وتحديثها في ضوء الأدلة الجديدة.
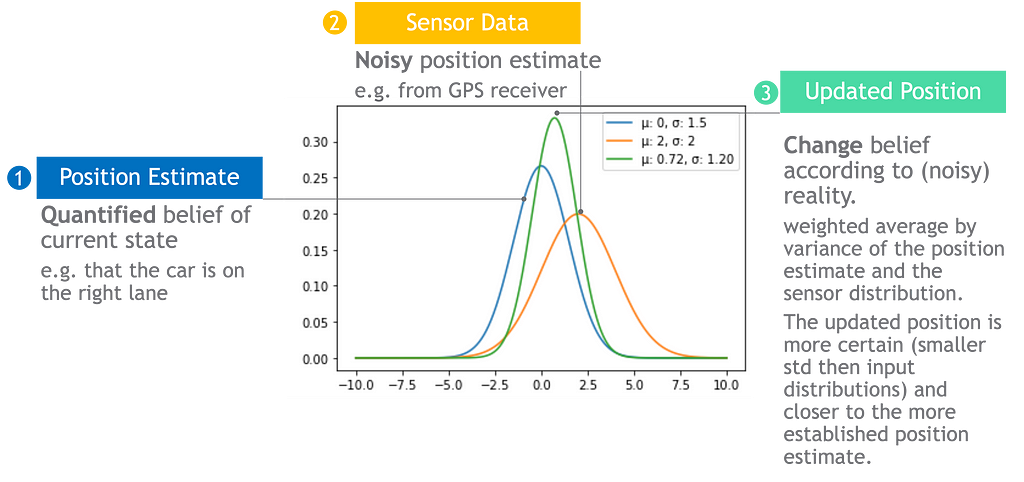
في سياقنا، P(H) هو تخميننا الأولي لموضع الروبوت، وP(H|E) هو تخميننا المحدث بعد قياس أدلة المستشعرات E.
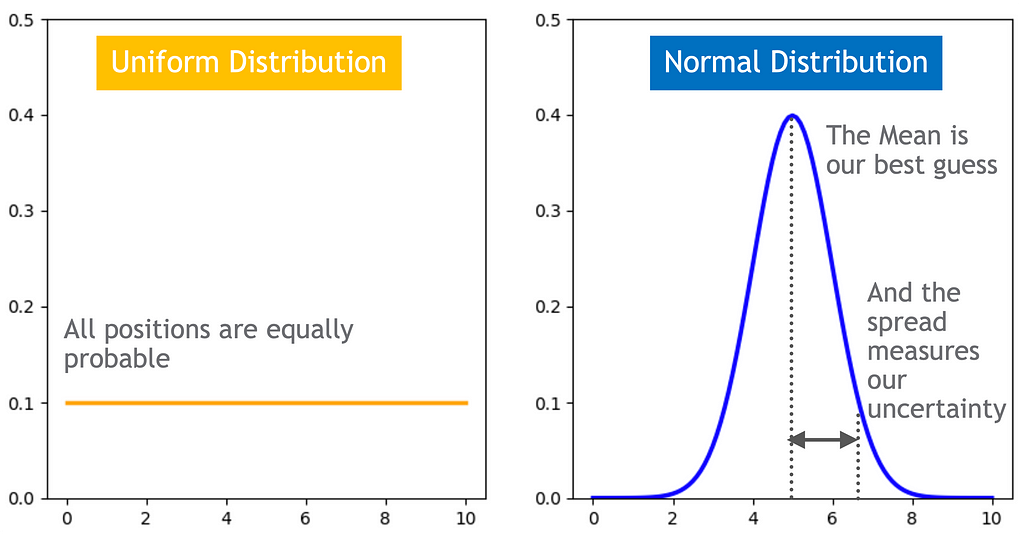
يحدد توزيع احتمالية الفرضية مدى يقيننا في موضع الروبوت.
يمكن أن تتغير الفرضية حسب الأدلة
كلما كانت بيانات المستشعرات غنية بالمعلومات ودقيقة، كان تأثيرها أكبر. إذا كان المستشعر مثاليًا، فسوف يتماشى موضع الروبوت مع قراءة المستشعر، وإلا إذا كانت بيانات المستشعر صاخبة جدًا أو غير مفيدة، فسيظل موضع الروبوت كما هو.
يمكن أن تجمع التحديثات بين مصادر متعددة للأدلة
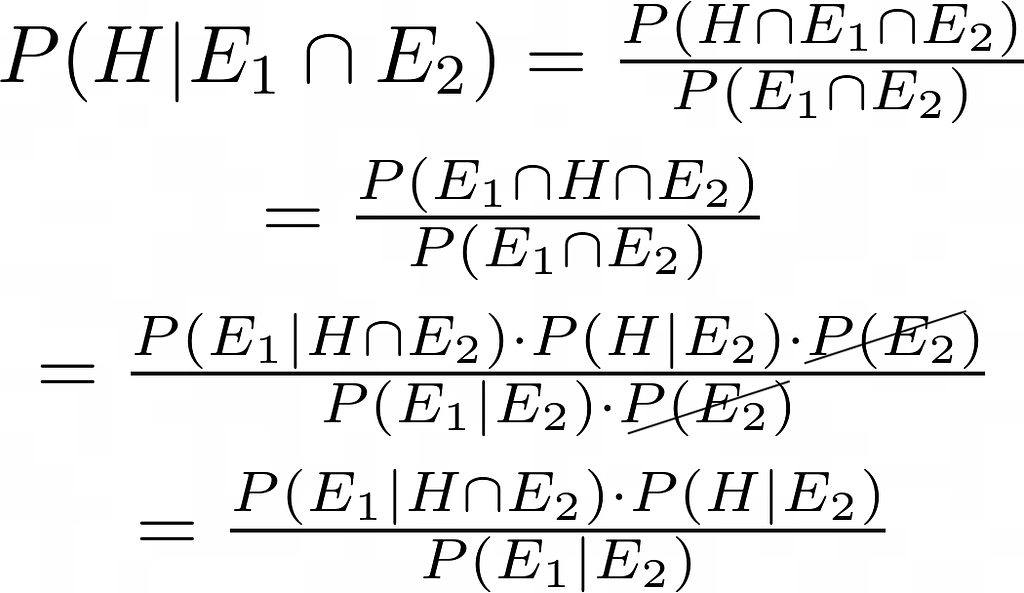
يمكننا صياغة قانون بايز للجمع بين مصادر بيانات متعددة باستخدام قاعدة السلسلة، والمعروفة أيضًا بقاعدة المنتج العامة. فهو يسمح بتبسيط التوزيع المشترك للأدلة المتعددة إلى منتج الاحتمالات المشروطة.
على سبيل المثال، غالبًا ما نستخدم نظام تحديد المواقع العالمي (GPS) للتنقل من موقعنا الحالي ولكن نظام تحديد المواقع العالمي (GPS) يعمل بشكل أفضل في السماء الصافية وتقتصر دقته على بضعة أمتار. لا يمكن للسيارات ذاتية القيادة الاعتماد فقط على نظام تحديد المواقع العالمي (GPS) للبقاء في حارة يبلغ عرضها بضعة أمتار والتنقل في الأنفاق أو مواقف السيارات تحت الأرض. يمكن للمركبات ذاتية القيادة تعويض أوجه القصور في نظام تحديد المواقع العالمي (GPS) عن طريق إضافة المزيد من مصادر المعلومات مثل الكاميرات.
3. مثال شامل: كيفية استخدام خوارزميات بايزي لتحديد موضع الروبوت في حالة عدم اليقين؟
دعونا نتعمق في مرشح بايزي الذي يعمل بشكل متكرر على تحسين تقديرات احتمالية التوطين باستخدام الاستدلال البايزي. تعني الطبيعة العودية أن مخرجات المرشح في الوقت t_0، P(H|E)، تعمل كمدخل فرضي للطابع الزمني التالي t_1، P(H).
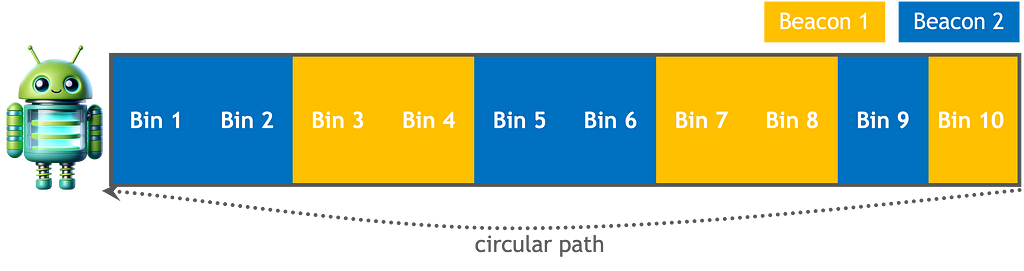
لنفترض أن روبوت التوصيل يسلك مسارًا دائريًا داخل محطة فضائية لنقل الإمدادات. يمتلك الروبوت خريطة توضح بالتفصيل موقع الأرض وموقع أجهزة الاستشعار.
– تعريف المشكلة:
نشير إلى موقع الروبوت المقدر باسم مساحة حالة الروبوت. على سبيل المثال، يمكن لمتجه ثنائي الأبعاد (أي زوج مرتب من الأرقام) يتتبع موضع المحور السيني وسرعة المحور السيني تتبع موقع الروبوت وتغيير السرعة في بُعد واحد. من الممكن توسيع مساحة حالة الروبوت إلى أبعاد إضافية لتتبع أبعاد الموضع المتعددة (y، z)، والاتجاه، وما إلى ذلك.
من أجل التبسيط، يمكننا أن نفترض أن الروبوت الخاص بنا يتحرك بسرعة ثابتة. تضيف الحركة عدم اليقين إلى الحساب، حيث أنها ليست موثوقة بنسبة 100٪. قد يفشل المحرك في العمل بسرعة معينة أو قد يواجه الروبوت عوائق، مما سيؤدي إلى تجاوز الروبوت أو تقليل حركته المتوقعة.
سوف يستشعر الروبوت الخاص بنا موقعه عن طريق قياس وجود منارة. قراءات المستشعر، وتسمى أيضًا مساحة القياس، ليست دقيقة بنسبة 100%. قد تخلط أجهزة الاستشعار بين الضوضاء وإشارة المنارة التي يمكن أن تؤدي إلى إنذارات كاذبة أو تفشل في اكتشاف الإشارة على الإطلاق.

– الخوارزمية: مرشح الرسم البياني
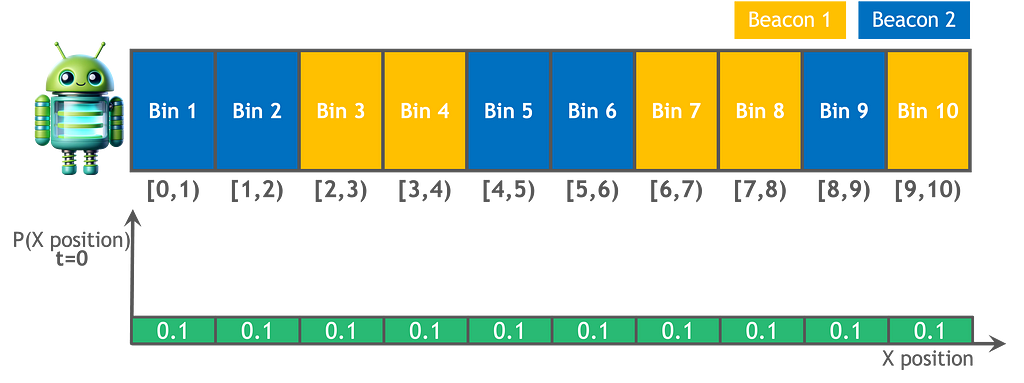
باستخدام هذا المرشح البايزي، يتم تمثيل مساحة حالة الروبوت بواسطة رسم بياني من خلال عدد محدود من الصناديق أو المناطق. إنه مرشح منفصل، مما يعني أن الروبوت لا يمكن أن يكون إلا في إحدى هذه المناطق، ونحن نحسب احتمال وجود الروبوت في كل منها. بالإضافة إلى ذلك، داخل كل حاوية، مثل مساحة 5 أمتار مربعة، يكون احتمال التواجد في أي نقطة محددة هو نفسه. إذا أردنا زيادة التفاصيل، يجب علينا إضافة المزيد من الصناديق.
هذا المرشح غير معلمي، مما يعني أنه لا يقدم أي افتراضات قوية بشأن تمثيل حالة الروبوت، ولا يقتصر على نوع واحد من التوزيع مثل التوزيع الغوسي. إنها قادرة على تمثيل تقديرات الموقع المعقدة، مثل فرضية الوسائط المتعددة التي تحتفظ بأفضل التخمينات المتعددة، ولكنها تأتي بتكلفة حسابية – تعقيد أسي. من أجل إضافة بُعد إضافي، من 1-D إلى 2-D مع الحفاظ على نفس التفاصيل، سنحتاج إلى 10×10 صناديق، وللانتقال إلى 3-D سنحتاج إلى 10×10×10 صناديق، وهكذا. يعد هذا قيدًا كبيرًا على الروبوتات التي تتتبع أبعادًا متعددة وتكون محدودة في الذاكرة وقوة الحوسبة.
– عملية حسابية:
- تخمين الأولي: نبدأ من مكان مجهول ومجهز بخريطة. في البداية، تكون كل منطقة ذات احتمالية متساوية، كما يمثلها التوزيع الموحد عبر جميع الصناديق.
2. وظيفة الحركة: يحاكي حركة الروبوت. حركة الروبوت عشوائية، مما يعني أنه ليس من المضمون الانتقال إلى الصندوق المطلوب في كل خطوة زمنية. لتحديث موقع الروبوت بعد كل خطوة، نحسب احتمالية تواجد الروبوت في كل منطقة في الخطوة الزمنية التالية. يأخذ هذا الحساب في الاعتبار احتمال بقاء الروبوت في نفس المنطقة واحتمال انتقاله إلى منطقة مختلفة.
For each movement:
For each region:
Region probability at time t+1 =
Region probability at time t x stay probability +
Probability of robot coming from the neighboring region x move probability

كما هو موضح في المعادلة أدناه، فإن حركة الروبوت بخطوة واحدة لن تغير تقدير الموقع بسبب التوزيع الموحد، حيث يكون لكل منطقة احتمالية متساوية للبقاء والتحرك.

حتى لو بدأنا في البداية عند سلة المهملات بيقين كامل (100%)، فإن العشوائية المتأصلة في الحركة ستضيف ضوضاء تدريجيًا، مما يقودنا نحو توزيع موحد بمرور الوقت. نحن بحاجة إلى إضافة المعلومات!
3. وظيفة الإحساس: يتضمن قياسات تضيف معلومات باستخدام نظرية بايز.
After each movement:
For each region:
Region probability at time t+1 given measurement at time t+1 =
Likelihood of the measurement given the robot is in that region
x Region probability at time t+1 after movement
x normlization to ensure that all the probabilities sum to 1.
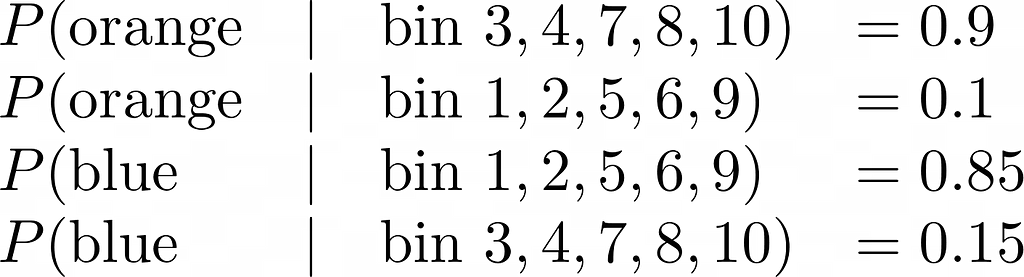
يتم تمثيل موثوقية المستشعرات بالاحتمالات، حيث أنها ليست دقيقة بنسبة 100%. توضح المعادلات أدناه أنه عندما يكتشف المستشعر اللون البرتقالي، هناك احتمال بنسبة 90% أن يكون الروبوت موجودًا في سلة برتقالية، واحتمال 10% أن يكون المستشعر مخطئًا وأن الروبوت موجود بالفعل في سلة زرقاء.
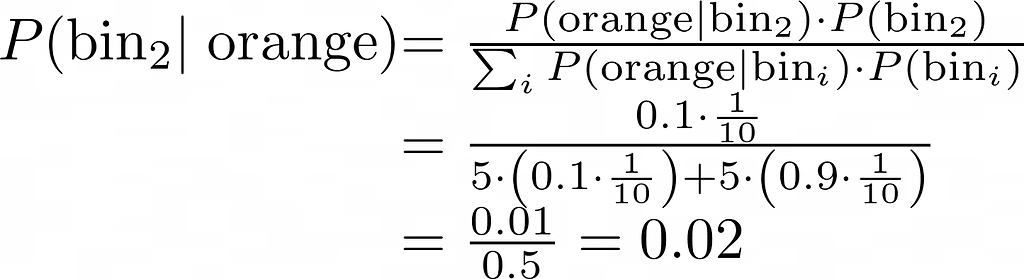
يوضح الحساب الموضح أدناه أنه، على عكس الحركة، تساهم أجهزة الاستشعار بالمعلومات وتحسن فهمنا لموقع الروبوت. على سبيل المثال، نظرًا لأن الحاوية 2 ليست برتقالية اللون، فإن احتمالية وجود الروبوت فيها تتضاءل من 0.1 إلى 0.02.
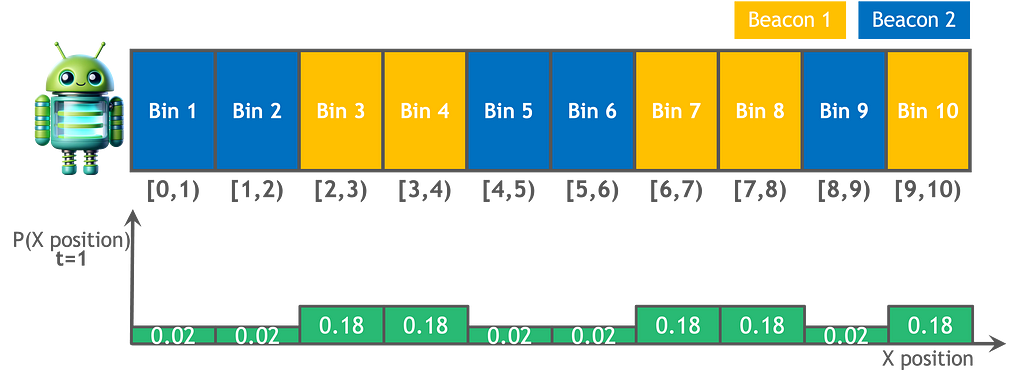
توضح الصورة أدناه فرضية الموقع المحدثة بعد دمج بيانات الحركة وأجهزة الاستشعار في تخميننا الأولي.
افكار اخيرة
أين الروبوت؟ يمكننا تحسين إجابتنا على هذا السؤال بشكل مستمر باستخدام مرشحات بايزي العودية، بدءًا من التوزيع الموحد الذي يبقي جميع التخمينات محتملة على قدم المساواة حتى نستقر على التخمين الأكثر احتمالاً.
تساعدنا مرشحات بايزي على قياس ثقتنا في مكان وجود الروبوت، وتحديث هذا الاعتقاد من خلال دمج بيانات الاستشعار (المزعجة) مع المعلومات السابقة (موقع الروبوت المقدر بعد الحركة).
مصادر:
- هذه هي ملاحظاتي الموجزة من المحاضرات الأولى لدورة edX الموصى بها بشدة بعنوان “خوارزميات بايزي للمركبات ذاتية القيادة” للدكتور روي يوزيفيتش.
- الروبوتات الاحتمالية GitBook: مرشح غير حدودي
- احتمال ويكيبيديا، نظرية الاحتمالات ونظرية بايز
- مدونة دانييل سابيناس الشخصية حول مرشحات الرسم البياني
- المحول عبر الإنترنت من اللاتكس إلى png.
- الصور: تم إنشاء الصورة الرمزية للروبوت باستخدام Dall-E. تم إنشاء جميع الصور الأخرى المستخدمة في هذه المقالة بواسطة المؤلف.
كيف تجد نفسك في العالم الرقمي؟ تم نشره في الأصل في نحو علوم البيانات على المتوسط، حيث يواصل الأشخاص المحادثة من خلال تسليط الضوء على هذه القصة والرد عليها.
رابط المصدر




